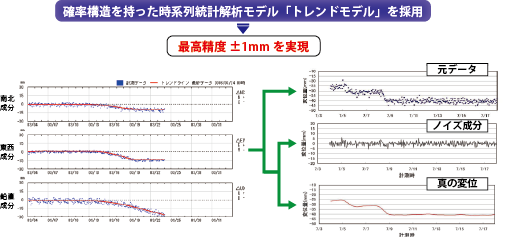
高精度を実現する誤差処理技術(1) -トレンドモデル(時系列統計処理技術)-
トレンドモデル(時系列統計処理技術)
GPS/GNSS計測では、基線長(基準点と計測点間の距離)、気象条件、マルチパス(建物などの地物による反射波)等の様々な誤差要因のため計測値がバラつき、最も高精度なスタティック測位法でもmm単位の変位判定は難しいのが一般的です。
shamen-netでは、トレンドモデルを採用することで高精度な変位検出が可能となっています。
 ※画像をクリックすると、拡大したグラフ画像をご覧いただけます。 |
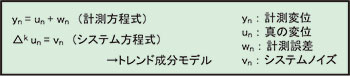
トレンドモデルの基本式とカルマンフィルターの概念図
真の変位unをトレンド成分モデルと呼ばれるシステム方程式(k階の確率差分方程式)のパラメータとし、実際にGPS/GNSSによって計測される変位と関係づける観測方程式を作り、その連立方程式からカルマンフィルターと赤池情報量基準(AIC)を用いて真の変位unを推定する方法です。
 |
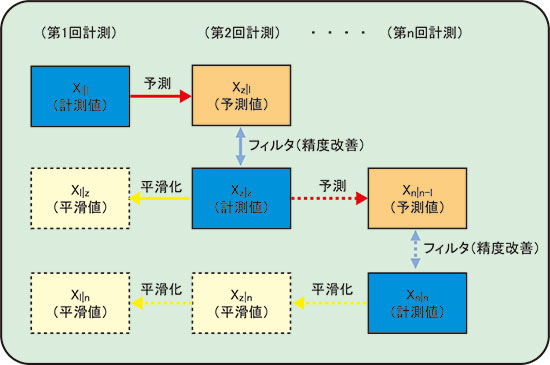 |
時間変化の推定については、カルマンフィルターを用いて観測地ynに基づく状態unの推定と平滑化を行います。 また、システム方程式と観測方程式のフィッティングにはAICを用いています。 |
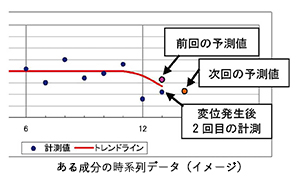 |
下図の青い点はGPS計測データ、赤い線(=トレンドライン)は時系列解析結果を示しています。計測データが追加されるたびに、逐次、解析を行い、真の斜面変位をグラフに描きます。トレンドモデルにより1〜2mm程度の変位を検知することが可能です。
 |
※松田浩朗,安立 寛,西村好恵,清水則一(2002):GPSによる斜面変位計測結果の平滑化処理法と変位計測予測手法の実用性の検証,No.715/III-60, pp.333-343,土木学会論文集



